Oggi, solo in Italia si effettuano 14000 amputazioni di arti superiori e inferiori, gran parte delle quali (2800) riguardano il distretto della mano, falangi e dita.
Di fronte a numeri così elevati numerosi studiosi da tutto il mondo hanno concentrato le loro energie e il loro lavoro per restituire ai soggetti colpiti da questa tragedia la possibilità di riavere, anche se parzialmente, gli arti amputati.
In particolare, alla fine degli anni ’80, Dario Paolo, professore presso la Scuola Superiore Sant’Anna di Pisa, lanciò il progetto LifeHand con l’intendo di creare una protesi di mano a controllo neurale.
Collaborarono a quest’impresa numerosi studiosi internazionali, tra cui Gregory T.A.Kovacs e Patrick Aebischer, e le attività di ricerca vennero inserite nei progetti europei INTER, GRiP, cYBeR- Hand, neURoBoticS, dactin e neBiaS.
Dopo vent’anni di ricerca ce l’hanno fatta! Presso l’ateneo dell’Università Campus Bio-Medico di Roma e il suo Policlinico si è riusciti a far funzionare con successo una protesi di mano bionica mediante interfacce neurali impiantate nei nervi periferici di un paziente amputato.
Da allora, le attività di ricerca del gruppo sono proseguite con un nucleo centrale di ricercatori composto dal Prof. Paolo Maria Rossini (Neurologo, oggi Direttore di Cattedra presso il Policlinico Universitario Agostino Gemelli di Roma) e dal suo team, dal Prof. Silvestro Micera (responsabile dell’Area di Neuroingegneria e delle attività relative al controllo neurale di protesi di mano presso l’Istituto di BioRobotica della Scuola Superiore Sant’Anna di Pisa) e dal Prof. Eugenio Guglielmelli, Direttore del Laboratorio di Robotica Biomedica e Bio- microsistemi dell’Università Campus Bio-Medico di Roma.
Si è quindi aperta una nuova fase, a cui si è dato l’appellativo LifeHand 2, per la quale si è realizzato un sistema pro-tesico impiantabile, dotato di un numero elevato di sensori e controllato esclusivamente dal sistema nervoso del soggetto. Questa ‘mano artificiale’ in un futuro prossimo sarà capace di manipolare gli oggetti con lo stesso grado di precisione di un arto naturale!
Il progetto Lifehand 2 aveva due obbiettivi principali: far si che la protesi sentisse e manipolasse gli oggetti e fosse anche in grado di attuare una comunicazione bidirezionale in tempo reale.
Questa mano artificiale doveva poter scambiare informazioni circa la forma, consistenza e posizione di differenti oggetti direttamente con il cervello, grazie ai quattro elettrodi intraneurali impiantati nei nervi mediano e ulnare del moncherino del soggetto e a sensori tattili posizionati sulle dita e mignolo. Inoltre vi doveva essere anche una comunicazione inversa, ossia doveva poter esiste un flusso di informazioni che dal cervello arrivavano alla protesi, in modo che questa riuscisse ad afferrare gli oggetti con movimenti naturali ed efficacie, e allo stesso tempo doveva saper calibrare la giusta forza per effettuare diverse prese.
Si tratta di un progetto rivoluzionario! Sarebbe il primo controllo bidirezionale di arto superiore biomeccatronico, capace di tramettere sensazioni dalla protesi al cervello e acquisire le intenzioni di movimento dettate dal cervello alla protesi. Come se non bastasse tutto questo processo deve avvenire in tempo reale, ovvero senza alcun ritardo di sensazione e reazione, in modo da permettere al soggetto di regolare la forza nel corso del movimento.
Le fase della sperimentazione
Il 18 Gennaio 2013, con l’arrivo del paziente scelto a Roma, si è dato il via a questo esperimento molto ambizioso. Per prima cosa il soggetto è stato sottoposto a controlli preoperatori, presso il Policlinico Universitario ‘Agostino Gemelli’, in modo da verificare il suo stato di salute e osservare la riorganizzazione delle sue regioni e funzioni cerebrali a seguito dell’amputazione della mano sinistra (2004).
Di seguito la lista degli esami che gli sono stati prescritti:
• esami del sangue;
• elettrocardiogramma;
• radiografia del torace;
• elettroencefalogramma (eeG) a 32 canali, a ri- poso e con stimolazione periferica;
• potenziali evocati Sensitivi (SeP) con immagi- nazione motoria;
• elettroneurografia (enG) ed ecografia dei nervi nel moncherino e nell’arto sano;
• stimolazione Magnetica transcranica (tMS);
• eeG/tMS di tre differenti aree corticali (frontale, centrale, posteriore);
• risonanza Magnetica funzionale (fMRi) con mappatura corteccia motoria e sensoriale;
• valutazione clinica con scale sul dolore da arto fantasma;
• test neuropsicologici di personalità.
Il giorno 26 Gennaio, presso la stessa struttura, alle 8.30 si è iniziato l’intervento chirurgico per l’installazione dei quattro elettrodi intraneurali TIME sui nervi mediano e ulnare, due per ciascuno, disposti trasversalmente rispetto ai fasci nervosi. Per questa operazione assai delicata hanno utilizzato un microscopio operatorio e un ago-guida, mentre per fissare gli elettrodi si è optato per una microsaldatura. Hanno quindi effettuati quattro fori sul braccio del paziente per i cavi degli elettrodi, necessari per il collegamento alle apparecchiature sperimantali adoperate durante i tes delle settimane successive.
L’intervento è stato eseguito in anestesia generale dal neurochirurgo, Prof. eduardo Marcos Fernandez, e dalla sua équipe; è durato ben sette ore e ha richiesto un’incisione di circa quindici centimetro sul lato interno del braccio. In tutto questo tempo, oltre all’installazione degli elettrodi, si è testato direttamente in sala operatoria il sistema di stimolazione e il corretto funzionamento dei 64 contatti (16 per ogni elettrodo). Dopo soli due giorni il paziente è stato dimesso e ha iniziato il programma di educazione e sperimentazione della protesi.
La fase ‘training’ consisteva in tre settimane trascorse ad effettuare, per diverse ore al giorno, esercizi mirati per insegnare al soggetto a riconoscere e classificare i diversi impulsi elettrici.
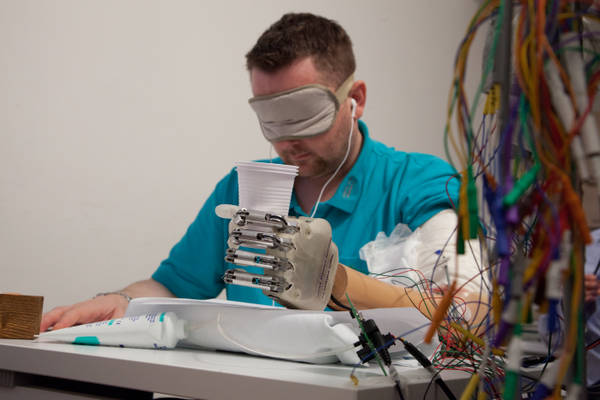
Infine si è giunti alla sperimentazione con protesi, durata otto giorni (dal 16 al 23 Febbraio), durante i quali il paziente trascorreva otto ore al giorno, distribuite in due sedute di quattro ore ciascuna,a svolgere esercizi di riconoscimento al tatto e di presa di oggetti dalle forme e consistenze diverse. Per quasi tutto il tempo il soggetto era bendato e isolato acusticamente in modo da isolare le sole sensazioni sensoriali inviate dalla protesi al cervello, senza l’influenza della vista e dell’udito.
Per realizzare il circuito bidirezionale di comunicazione dalla protesi al cervello (sensoriale) e viceversa (intenzione di movimento e presa), sono stati messi a punto dai ricercatori due algoritmi:
uno in grado di ‘leggere’ gli output provenienti dai sensori tattili delle dita robotiche e di inviarli in forma di impulsi elettrici al sistema nervoso attraverso gli elettrodi intraneurali; l’altro capace di acquisire, processare e decodificare i segnali provenienti dagli elettrodi miografici di superficie (sEMG) collocati sui muscoli del moncherino del paziente e di trasformarli in appropriati comandi motori per la mano robotica.
Il 24 febbraio 2013 termina ufficialmente il periodo di sperimentazione della protesi, autorizzato per soli 30 giorni, e tramite un secondo intervento chirurgico l’impianto dei quattro elettrodi viene rimosso dal soggetto.
I risultati
L’esito dell’esperimento è stato più che positivo, dando così una reale speranza per la realizzazione futura di mano bioniche in grado di sostituire al 100% arti superiori amputati.
Andando nel dettaglio, il paziente è stato velocemente in grado di:
• Gestire in modo adeguato la forza del palmo combinando correttamente le aree sensoriali;
• distinguere la diversa consistenza di oggetti duri, intermedi e morbidi (oltre il 78.7%diaccuratezza);
• riconoscere dimensioni e forme di oggetti elementari, come il cilindro di una bottiglia, la sfera di una pallina da baseball o l’ovale di un mandarino (88% di accuratezza);
• capire la posizione di un oggetto rispetto alla mano e inviare alla protesi il comando più appropriato per realizzare la presa più adeguata (97% di accuratezza);
• autocorreggere un errore nel livello di forza pressoria sull’oggetto durante il movimento stesso, con tempi di reazione inferiori ai 100 millisecondi;
• gestire in tempo reale differenti livelli di pressione per le due diverse parti sensorizzate (indice-pollice, mignolo) durante una presa palmare (93% di accuratezza).
Sorprendentemente dopo la disattivazione del feedbak e la riacquisizione del soggetto della vista e dell’udito, la destrezza del paziente è calata sensibilmente, mettendo in luce l’importanza del feedback.
Tuttavia, nonostante gli enormi passi avanti, rimane ancora una problematica non indifferente: la vicinanza dei circuiti elettronici della protesi biomeccatronica agli elettrodi impiantati nei nervi, ha provocato interferenze elettroniche a danno della chiarezza del segnale intraneurale di comunica- zione tra protesi e sistema nervoso (questo tipo di problema non si era minimamente riscontrato nel progetto LifeHand del 2008 dato che allora la protesi era posizionata su un banco, a una distanza di circa due metri dal braccio su cui erano impiantati gli elettrodi).
Per questo, in questa fase del progetto i ricercatori non hanno voluto rischiare e hanno deciso di rinunciare all’invio delle intenzioni di movimento dal cervello alla protesi attraverso gli elettrodi intraneurali, adoperando al loro posto elettrodi mioelettrici applicati sulla superficie del braccio in prossimità dell’amputazione.
Grazie ai preziosissimi dati che sono riusciti a raccogliere durante questa sperimentazione, i ricercatori mirano a risolvere questa problematica e a realizzare una protesi la cui comunicazione bidirezionale sia totalmente intraneurale.

La tecnologia
Per questo esperimento hanno adoperato due diversi elettrodil: TIME (Transverse Intrafascicular Multi-channel Electrodes), hardware di comunicazione tra fibre nervose e computer, ed elettrodi intraneurali impiantati nei nervi del paziente. Sono stati progettati e sviluppati presso il laboratorio di Microtecnologia Biomedica dell’iMteK (Institut für Mikrosystem- technik) dell’Università di Friburgo, sotto la direzione del Prof. Thomas Stieglitz.
Gli elettrodi TIME sono totalmente biocompatibili e sono stato progettati per essere impiantati trasversalmente rispetto ai fascicoli nervosi di un nervo, così da aumentare i punti di contatto tra gli elettrodi e le fibre nervose e quindi aumentare la comunicazione con il sistema nervoso centrale. Si tratta di strutture del diametro minimo di 220 micrometri, il cui spessore è circa 22 micrometri e di larghezza variabile (massimo 350 micrometri).
I 16 contatti elettrici (o siti attivi) di cui sono dotati gli elettrodi, hanno un diametro di 80 micrometri e vengono realizzati in platino e ossido di iridio su un substrato di poliimmide, che ne garantisce l’isolamento e la flessibilità. Inoltre gli elettrodi sono in grado di sostenere una carica elettrica pari a 120 nanocoulomb e mantengono un’elevata efficienza anche dopo aver ricevuto oltre 25 milioni d’impulsi elettrici.
Dall’analisi dei dati ricavati dalla sperimentazione, si è riscontrata un’elevata capacità degli elettrodi di attivare selettivamente delle fibre nervose distribuite lungo il diametro del nervo, grazie alla quale sono in grado di trasmettere sensazioni al sistema nervoso anche con impulsi d’intensità molto piccoli (in questo modo si riduce lo stress sui nervi e il rischio che si infiammino).
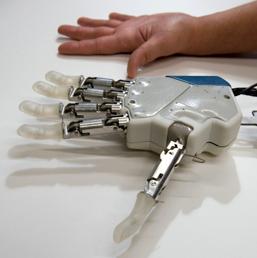
Per quanto riguarda la protesi adoperata nel progetto LifeHand 2, OpenHand, bisogna ringraziarel’ArtsLab dell’istituto di BioRobotica della Scuola Superiore Sant’anna di Pisa. Si tratta di un prototipo CyberHand e SmartHand del tutto innovativo, molto più avanzato di quello utilizzato per il progetto LifeHand del 2008.
La sua realizzazione è il risultato di un progetto di ricerca biennale (OPEN neuro-prosthetic HAND platform for clinical trials) promosso dal Ministero dell’istruzione, dell’Università e della Ricerca italiano (MiUR), il cui obiettivo principale era realizzare un prototipo di dimensioni, capacità di movimento (più gradi di libertà) e peso pari a quelli di una mano umana.
Ai fini della sperimentazione sono stati attivati contemporaneamente, i sensori dell’indice e del mignolo, che sono stati in grado i sensori tattili erano capaci, grazie a un particolare algoritmo di conversione e decodifica, di restituire cariche di corrente elettrica proporzionali alla quantità di pressione esercitata nel contatto con oggetti o altri elementi esterni.
Il paziente X
Vi chiederete chi è stato scelto per sottoporsi a un esperimento tanto importante e il perché.
Il nostro uomo è Dennis Aabo Sørensen, 36 anni, di origine danese, padre di tre figli e titolare di un’impresa che si occupa di pitture d’interni. Purtroppo il giorno di capodanno, pochi minuti dopo la mezzanotte, gli è esploso un petardo nella mano sinistra che ne ha causato l’amputazione.
Come molte persone che soffrono della mancanza di un arto, si è prontamente candidato per partecipare a questo progetto, che gli ridava una possibilità, seppur minima e incerta, di risolvere il suo problema. Dennis rispondeva a tutte le specifiche fisiche, psicologiche e anagrafiche; in particolare, a livello psicologico non doveva soffrire di problemi cognitivi e psicologici, doveva essere giovane ma anche maturo per riuscire a gestire correttamente la fatica, lo stress e la stanchezza, era necessario che possedesse un’intelligenza brillante e un atteggiamento proattivo per imparare rapidamente a eseguire con attenzione e precisione i compiti assegnategli e saper comunicare in modo corretto le sue sensazioni, ovviamente si parlava in lingua inglese. Mentre a livello fisico doveva avere un quadro di salute stabile, essere in grado di sostenere due interventi chirurgici in anestesia totale nell’arco di 30 giorni e dopo 48 ore dall’impianto avere ancora la forza di sottoporsi a una lunga serie di test ed esercizi; infine era necessario che avesse subito un’amputazione sufficientemente vicina all’area distale (mano) dell’arto superiore.
Dopo tutti questi progressi, nell’arco di soli 5 anni e considerando la quantità di persone che ci lavora giorno e notte, non credo sia da pazzi sognare un giorno di vivere una società nella quale le protesi saranno in grado di sostituire perfettamente gli arti: in fondo il corpo umano è una macchina perfetta e che macchina sarebbe senza pezzi di ricambio?!
di Sara Pavesi
Linkografia:
http://www.unicampus.it/lifehand/lifehand-2-il-progetto
il video:
https://www.youtube.com/watch?v=zymX9MuB8XU&list=PLmRa-ogyrXdKcmj_MZNh1DuMc_9kQh9dJ