Bastiaan Krosse, Jeroen Ploeg e Almie van Asten del progetto I-GAME, finanziato dall’UE, spiegano come funzioneranno le auto che si guidano da sole.

L’idea può sembrare ancora fantascientifica, ma le auto che si guidano da sole sono proprio dietro l’angolo. Tecnologie come i sistemi di parcheggio intelligenti, controllo dinamico di crociera o i sistemi di avviso di deviazione dalla corsia stanno diventando standard nelle nuove auto. Le principali aziende high-tech stanno sperimentando la guida automatica in condizioni reali e alcuni produttori di auto stanno già presentando aggiornamenti di software che vedono le proprie auto guidarsi da sole su autostrade o andare a prendere il proprietario all’entrata del suo centro commerciale preferito.
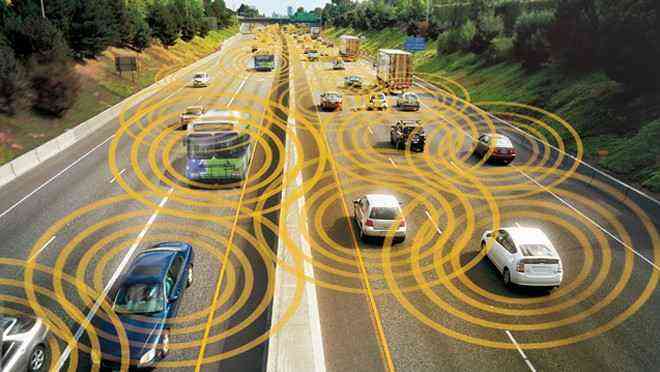
Quello che ancora manca, però, è la garanzia che un mondo pieno di automobili automatiche sia realistico dal punto di vista di sicurezza e fluidità del traffico. Le auto del futuro dovranno essere in grado di “parlare” e capirsi tra di loro per evitare incidenti e ottimizzare le decisioni – tutto ciò in situazioni che a volte vedono centinaia di auto che si muovono nello stesso luogo.
L’obiettivo del team di I-GAME (Interoperable GCDC AutoMation Experience), finanziato dall’UE, è quello di permettere questa comunicazione tra veicoli automatici, attraverso lo sviluppo di tecnologie ad ampio spettro e di testarle entro GCDC giugno 2016, quando si concluderà il “Grand cooperative driving challenge”. Questa sfida vedrà competere diverse squadre di progettazione per l’implementazione dei sistemi di veicoli cooperativi.
I benefici in termini di sicurezza sono già stati osservati con le tecnologie disponibili in commercio come il controllo di crociera adattivo e il sistema di assistenza per il mantenimento della corsia. Poi, quando si parla di efficienza, la guida automatica si traduce in un uso più efficiente di carburante o batterie, strade e persino parcheggi.
I-GAME comporta un’automazione cooperativa, che significa interazione e cooperazione tra veicoli. L’implementazione di una tale cooperazione – che implica che ogni veicolo “conosca” le intenzioni degli altri sulla strada – migliorerà sicuramente la sicurezza. Le statistiche europee mostrano che circa il 90% degli incidenti stradali sono causati da errori umani. L’associazione di V2X e automazione potrà avere un impatto positivo sulla sicurezza.
I principali ostacoli della guida automatica su larga scala.

Un altro ostacolo notevole è la solidità dei sistemi del veicolo in tutte le condizioni operative. I-GAME prova i veicoli in scenari complessi che esigono alti livelli di prestazioni e robustezza del sistema nel suo insieme. Un processo di collaudo e validazione largamente accettato per i veicoli automatici, ed eventualmente per la loro certificazione, deve però ancora essere creato. Uno degli obiettivi del progetto è sviluppare una procedura di valutazione della sicurezza di questi tipi di veicoli automatici cooperativi in situazioni reali.
Jeroen Ploeg spiega che l’architettura di I-GAME è caratterizzata da quattro componenti principali. Prima abbiamo l’architettura di sistema generale che è stata creata a giugno 2014 e fornisce il quadro principale per gli sviluppi futuri del progetto. Poi c’è il protocollo di interazione che consiste in una sequenza di messaggi wireless e di controllori all’interno del veicolo per eseguire i nostri due scenari. Il protocollo per il primo scenario (unione di cooperazione e automazione) ha dovuto essere sviluppato di nuovo a causa della sua mancanza di precisione nella pratica, quindi abbiamo creato una versione migliorata che sarà testata nei prossimi mesi. Il protocollo di interazione per il secondo scenario (intersezione cooperativa), invece è stato progettato completamente su un livello di simulazione e sarà attuato su veicoli di riferimento nei prossimi mesi.
Il terzo componente è l’architettura software a bordo del veicolo. È stata già completamente determinata, anche se potrebbero essere necessari altri adattamenti in seguito all’implementazione del protocollo di interazione dello scenario 2.
Il pezzo finale del puzzle, l’architettura di comunicazione, si basa sugli attuali standard ETSI C-ITS sui Sistemi di trasporto intelligenti cooperativi. Vogliamo usare l’attrezzatura di comunicazione veicolo-veicolo attualmente in commercio per supportare soluzioni pluricostruttori. Per fare ciò, usiamo il più possibile le varianti di messaggi attualmente disponibili. Ma poiché gli attuali messaggi sono specifici per lo più per la conoscenza delle condizioni della strada e del veicolo, e non per interazioni di guida automatica, abbiamo progettato estensioni o nuovi messaggi per supportare le complesse interazioni necessarie in situazioni di GCDC.
Anche gli hacker costituiscono una minaccia che va gestita.
Ploeg riconosce che l’interoperabilità rappresenta una minaccia per la sicurezza, quest’ultimo argomento non è affrontato da I-GAME perché è al di fuori del nostro centro di interesse. Monitoriamo però da vicino gli sviluppi in corso in questo campo. Un progetto di follow-up è adesso in fase di organizzazione e si concentrerà sui gruppi di autocarri con un significativo coinvolgimento di diversi OEM di autocarri, esplicitamente sulla sicurezza, studiando tra le altre cose l’impatto sulle prestazioni dell’automazione in caso di una maggiore latenza.
Anche Google o forse Apple lavorano già su proprie soluzioni di guida automatica.

Per permettere la comunicazione tra veicoli di costruttori diversi e fare in modo che lavorino insieme è necessaria la compatibilità dei protocolli di interazione e delle tipologie di messaggi, ma non di un hardware specifico. Quindi chiunque voglia usare il proprio veicolo automatico con V2X e desideri usare i protocolli e le tipologie di messaggi (a livello del software) forniti dal progetto è il benvenuto. Invitiamo anzi le aziende come Google e Apple a competere e collaborare al GCDC 2016.
Questa sfida renderà più veloce lo sviluppo dei protocolli perché questi saranno esaminati in condizioni reali.
Linkografia: