https://www.youtube.com/watch?v=fquVcpU_Utc&t=4s
Un progetto finanziato dall’UE sta realizzando dei robot ispirati agli uccelli, con tanto di artigli, in grado di volare e planare su trespoli e piccole superfici. Alcuni ricercatori dell’Università di Siviglia, in Spagna, stanno cercando di costruire robot capaci di volare, atterrare e stare appollaiati proprio come gli uccelli veri.
Il nome del progetto finanziato dall’UE che sta alla base di questo lavoro è GRIFFIN (grifone), la creatura mitologica con il corpo di un leone e la testa e le ali di un’aquila. I ricercatori di GRIFFIN stanno utilizzando diversi metodi, strumenti e tecnologie per realizzare uccelli robot capaci di manipolare abilmente gli oggetti. Ciò significa che devono essere dotati di artigli che consentano loro di afferrare gli oggetti, nonché di aiutarli ad atterrare e a stare in posizione appollaiata. Sul sito web del progetto GRIFFIN si legge che i robot saranno in grado di volare riducendo al minimo il consumo di energia, di stare appollaiati su superfici curve e di manipolare abilmente gli oggetti e che la manipolazione verrà eseguita mantenendo il contatto fisso con una superficie, ad esempio un palo o un tubo, mediante uno o più arti, e utilizzando gli altri arti per manipolare gli oggetti, superando così i limiti della manipolazione abile in volo libero riscontrati negli attuali manipolatori aerei.
I Traguardi dell’ultimo anno
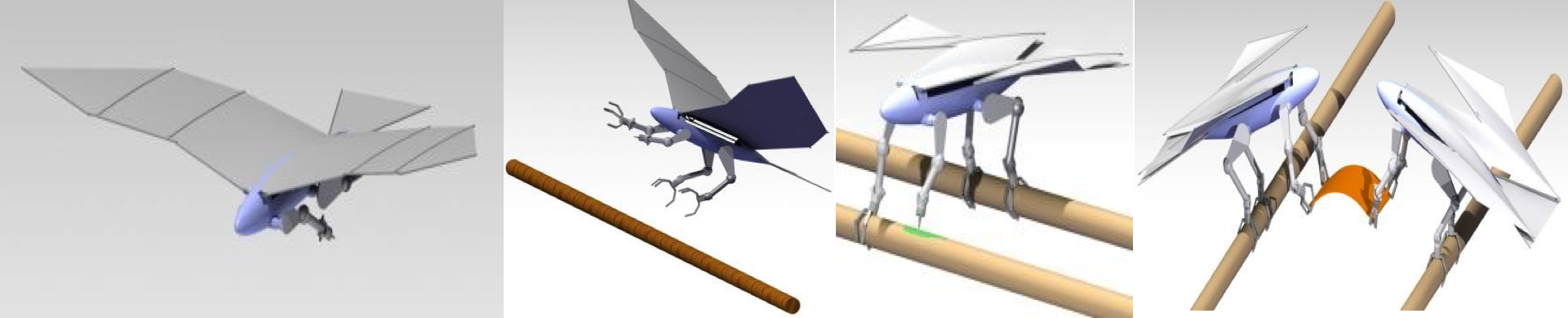
Un video pubblicato recentemente mostra i risultati ottenuti dal team di Siviglia. Tra gli altri, vengono illustrati una simulazione dell’uccello robot in stile videogioco e il collaudo delle ali del robot nella galleria del vento. Inoltre si possono vedere una dimostrazione di ali flessibili bio-ispirate capaci di eseguire il battito d’ali come in natura, e movimenti eseguiti da ali pieghevoli che riproducono fedelmente il battito d’ali degli uccelli veri. Il video mostra infine gli artigli robotici utilizzati per l’atterraggio e la posizione appollaiata.
Nel filmato si vedono due diversi tipi di uccelli robot, Powerbird ed E-Flap, ripresi durante il volo all’aperto e il volo autonomo al chiuso. Entrambi gli uccelli vengono ripresi mentre volano in una stanza o su un campo, per poi atterrare a terra o su un trespolo utilizzando gli artigli.
L’obiettivo finale del team di ricerca è costruire uccelli robot capaci di accedere in sicurezza alle zone non diversamente raggiungibili e di interagire fisicamente con le persone. I sistemi di controllo si baseranno su appositi modelli cinematici, dinamici e aerodinamici. I robot GRIFFIN saranno dotati di percezione, reattività e programmazione autonome sulla base di tali modelli e saranno in grado di associarsi ad altri per svolgere insieme compiti di manipolazione.
Il lavoro futuro del progetto GRIFFIN (General compliant aerial Robotic manipulation system Integrating Fixed and Flapping wings to INcrease range and safety) prevede l’integrazione di prototipi di battito d’ali nuovi e più avanzati con metodi di percezione e di programmazione, oltre alla capacità di manipolare oggetti e di stare appollaiati autonomamente. Il progetto, della durata di 5 anni, si concluderà nel mese di ottobre 2023.
Link del progetto