Immagina un robot umanoide in grado di aiutare a trasportare oggetti pesanti in giro o ad assistere i medici nelle loro sessioni di fisioterapia. Questi robot versatili diventeranno presto una realtà grazie al lavoro svolto nell’ambito del progetto CogIMon finanziato dall’UE.
Giocare a palla e spostare mobili possono sembrare due compiti completamente diversi, ma hanno un paio di cose in comune. Innanzitutto, è più facile farlo insieme. Quindi, questi compiti apparentemente poco impegnativi richiedono in realtà una sottile combinazione di forza, moderazione e sincronizzazione. Giocare a palla o muovere un tavolo con un robot in realtà non è così semplice.
C’è un robot umanoide, tuttavia, che potrebbe presto essere in grado di superare queste difficoltà.
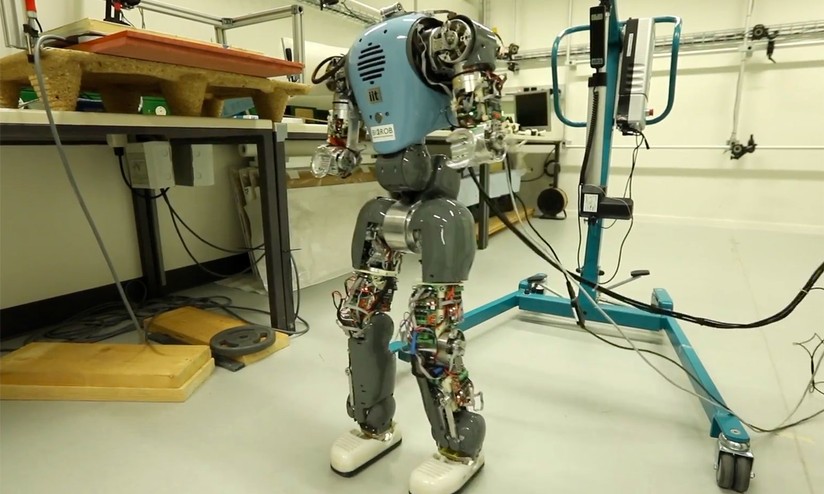
COMAN + è stato presentato dai suoi creatori come un umanoide economico, robusto e versatile, in grado di eseguire compiti quotidiani.
Il Prof. Dr Jochen Steil, coordinatore di CogIMon, Cognitive Interaction in Motion, ha descritto risultati più salienti del progetto, poco prima del suo completamento in maggio 2019.
“Ci siamo concentrati sui comportamenti che richiedono la comprensione delle forze applicate e la comunicazione implicita che le stesse richiedono, come la manipolazione congiunta di oggetti (trasportare tavole, sollevare congiuntamente oggetti pesanti) o il lancio e la presa reciproca di oggetti, perché in queste situazioni le forze sono stimate dal movimento. Un altro esempio è l’accoppiamento forzato di joystick in un gioco, in cui i giocatori imparano implicitamente gli uni dagli altri attraverso la comunicazione basata sulla forza.
In ambito industriale, capire le forze è fondamentale per i sistemi che richiedono l’assistenza fisica dei robot, che sostengono attivamente l’essere umano, regolando la propria forza in base alle capacità umane e al compito da svolgere.
Ciò va oltre l’utilizzo di conformità, per i soli motivi di sicurezza e consente un’azione più sofisticata e rispettosa dell’uomo. Le forze applicate dagli umani mostrano grandi variazioni anche in compiti ripetitivi e quindi un controller “taglia unica” non si adatta all’interazione fisica. I robot di assistenza dovranno controllare attivamente la loro forza per un’interazione regolare, ergonomica ed efficace.
La ricerca umanoide è il decathlon della robotica e richiede l’integrazione di molti campi disciplinari e diverse competenze.
Scientificamente, l’attuale comprensione dell’interazione umana in movimento, ha comportato la modellazione di come gli esseri umani imparano a controllare le forze in interazione e questi modelli ora sono implementati anche nei controlli robotici, nei sistemi multi-braccio e multi-gamba.
Dal punto di vista tecnologico, il robot umanoide potenziato COMAN + implementa attuatori a impedenza variabile.
Per la prima volta due robot umanoidi trasportano oggetti insieme. Quattro bracci robotici compatibili possano collaborare per sollevare e muovere un oggetto pesante in interazione.
Infine, è stata sviluppata un’applicazione per la fisioterapia, in cui la realtà virtuale e il controllo robotico, combinati insieme, consentono l’addestramento per la presa della palla dei pazienti.
Le applicazioni nella sanità, in fisioterapia e sull’ergonomia, mirano a sviluppare combinazioni di realtà virtuale e robotica, per consentire un’interazione fisica sicura durante l’allenamento dei pazienti in recupero fisico. Ciò richiede ulteriori progressi sia in termini di hardware che di strumenti di ingegneria per consentire lo sviluppo di applicazioni più coerenti e sistematiche, ma anche flessibili.
La ricerca di follow-up riguarderà anche le applicazioni multi-robot e il controllo dei robot umanoidi nelle attività quotidiane”.