
Quando Platone creò il mito di Atlantide probabilmente non si apettava che quest’ultimo avrebbe affascinato e alimentato l’immaginazione collettiva per quasi 2000 anni. A mantenere ancora queste forti suggestioni ci pensano i numerosi relittti e i siti sommersi che oggi si ritrovano nei fondali marini del tutto inviolati; purtroppo la loro esplorazione risulta difficile sia per le barriere logistiche sia per quelle finanziarie, salvo trovare soluzioni che rispondano ad entrambi i requisiti.
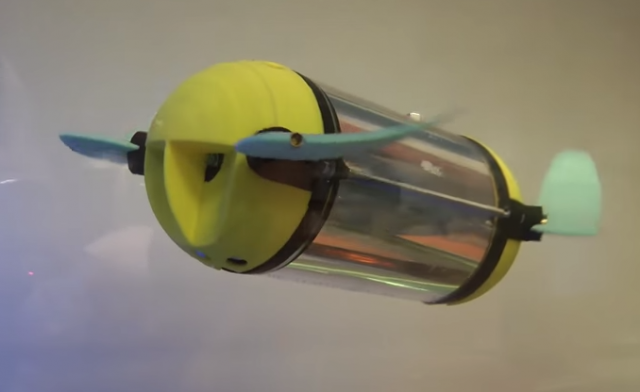
È proprio da queste specifiche necessità che nasce ‘ARSOWS’ (Archaeological Robot Systems for the World’s Seas), un progetto da 4 milioni di euro che consiste nello sviluppo di veicoli per l’esplorazione subacquea in grado di soddisfare tutti i requisiti e le aspettative degli archeologi del “mare profondo”. Dopo il varo di questo progetto (Settembre 2012), un consorzio formato da 10 partner ha sviluppato tre AUV (Automated Underwater Vehicles, veicoli subacquei automatici). Tra questi spicca U-CAT, un robot altamente manovrabile il cui design si inspira al corpo delle tartarughe. Progettato da ricercatori estoni, questo AUV è in grado di penetrare nei relitti marini di imbarcazioni metalliche abbandonate. Viste le sue ridotte dimenioni è in grado di attraversare anche stretti cunicoli e grazie alla forma arrotondata si riduce il rischio che si incastri in qualche antro del relitto. Inoltre pesando poco e per il suo design ergonomico può effettuare tutte le operazioni da piccole imbarcazioni. Infine considerando l’elevata manovrabilità ed efficienza, in termini di precisione dei movimenti nelle camere e nei corridoi dei relitti, questo dispositivo risulta sufficientemente economico da ridurre i danni finanziari nel caso si perda negli abissi marini.
Gli altri due AUV sono MARTA (MArine Robotic Tool for Archaeology) e A-Sized. Il primo è un veicolo dal costo contenuto progettato dall’Università di Firenze che presenta una struttura elettromeccanica modulare, dove con modulare si intende la capacità di poterlo smantellare e assemblare velocemente in modo da cambiare la configurazione del carico utile (sensori ottici e sonar). MARTA ha una forma a siluro e un diametro è 177 mm, piccolo se paragonato a quello di veicoli simili già in commercio. È attrezzato di un potente sensore di navigazione, che consente accurate geolocalizzazioni, due fotocamere digitali e un avanzato sonar.
Il secondo veicolo, A-Sized è stato progettaro da Edgelab SRL, una SME italiana con sede a La Spezia. Anche A-Sized è a forma di siluro, con un diametro ancora più piccolo di quello di MARTA (150 mm). L’Edgelab ha voluto realizzare un veicolo molto economico e facile da dispiegare, tuttavia così facendo ha dovuto ridurne le performance. Il peso del robot è molto modesto, solo 15 Kg circa, una soluzione logistica interessante ed economica sia per scienziati sia per archeologi.
Il coordinatore di ARROWS, nonché docente di robotica all’università di Firenze, Benedetto Allotta, ha elencato e argomentato dettagliatamente i punti forti di questa nuova tecnologia. In particolare, ha sottolineato l’importanza degli archeologi, attraverso l’Archaeological Advisory Group (la Commissione di Archeologi Europei ), nella formulazione di particolari requisiti per ogni fase della campagna archeologica e nella proposta di diverse tecnologie e scenari per testare questi veicoli.
Ovviamente i ricercatori hanno dovuto affrontare diversi problemi, primi tra tutti la mancanza di GPS, che sott’acqua rende particolarmente difficile la realizzazione di immagini con riferimenti geografici corretti e l’acquisizione di sonogrammi dei siti sommersi e poi la specifica richiesta degli archeologi che richiedevano un’accuaratezza di esplorazione nel raggio di un metro di distanza. Un’altro problema da risolvere è stato il sistema di comunicazione. Infatti la moderna tecnologia acustica è molto più lenta e meno affidabile del sistema di comunicazione radio, utilizzato ad esempio dagli aerei.
Numerosi test dei prototipi di questi rivoluzionari veicoli sono già stati effettuati in Toscana, Israele, Croazia e nel Mar Baltico, con risultati incoraggianti. I demos finali sono in preparazione ed è già stata programmata una campagna nell’arcipelago delle Egadi (Sicilia). Dopodicche sarà la volta dell’Estonia.
Visti tutti i vantaggi e i risultati raggiunti fin’ora non è da escludere una loro entrata sul mercato entro i prossimi tre anni. Chissà magari per allora il mistero di Atlantide sarà finalmente svelato.
di Sara Pavesi